Elektor Arduino គ្រប់គ្រងមនុស្សយន្តគំនូរ
លក្ខណៈបច្ចេកទេសផលិតផល
- មនុស្សយន្តគំនូរដែលគ្រប់គ្រងដោយ Arduino
- សមាសធាតុ៖
- Arduino Nano - ៥
- Nano Shield - ១
- ម៉ូឌុលប៊្លូធូស - ១
- សឺវីស - ៣
- ខ្សែ - 4
- វីសៈ
- M2X8 – ៦
- M2.5 × 6 – 2
- M3x6 - 2
- M3x8 - 15
- M3x10 - 3
- M3x12 - 6
- M3x16 - 2
- គ្រាប់៖
- M2 - 6
- M3 - 29
- ធុងហ្គាសៈ
- M3 - 2
- Spacers៖
- នីឡុងខ្មៅ M3x2 – 5
- M3x9 - 2
- សមាសធាតុបន្ថែម៖
- Springs 5 × 0.4 × 6 - 1
- ខ្លាឃ្មុំ M3x8 – 2
ការណែនាំអំពីការប្រើប្រាស់ផលិតផល
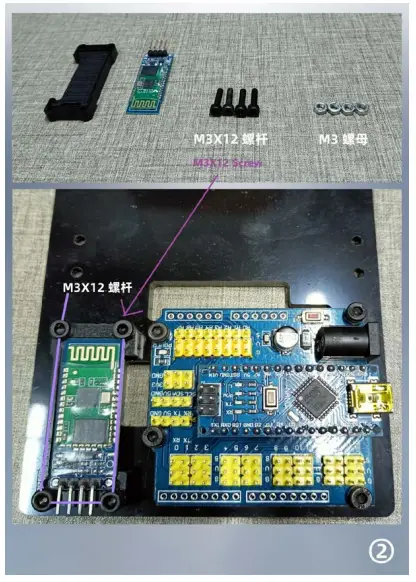
ជំហានទី 1: ដំឡើង Nano Expansion Shield
ជាដំបូង សូមដំឡើង Nano expansion Shield ជាមួយនឹងវីស 8x M3X8 និង 4x M3X2 spacers នៅក្នុងទីតាំងដែលបានបង្ហាញ។
ជំហានទី 2៖ ដំឡើងម៉ូឌុលប៊្លូធូស
បន្ទាប់មកដំឡើងម៉ូឌុលប៊្លូធូសជាមួយនឹងវីស 4x M3X12 ជាមួយនឹងគ្រាប់។
សមាសធាតុ
វីស
- M2X8 —៦
- M2.5 × 6 —2
- M3x6 —2
- M3x8–15
- M3x10–3
- M3x12–6
- M3x16–2
គ្រាប់
- ម២ —៦
- ម២ —៦
ហ្គាស
- ម២ —៦
Spacers នីឡុងខ្មៅ
- M3x2 —5
- M3x9 —2
និទាឃរដូវ
- 5 × 0.4 × 6 —1
សត្វខ្លាឃ្មុំ
- M3x8 —2
- Arduino Nano - ៥
- Nano Shield - ១
- ម៉ូឌុលប៊្លូធូស - ១
- សឺវីស - ៣
- ខ្សែ - 4
ការណែនាំអំពីការដំឡើង
ជំហានទី 1
- ដំបូង ដំឡើង Nano expansion Shield ជាមួយនឹងវីស 8x M3X8 និង 4x M3X2 spacers នៅក្នុងទីតាំងដែលបានបង្ហាញ

ជំហានទី 2
- បន្ទាប់មកដំឡើងម៉ូឌុលប៊្លូធូសជាមួយនឹងវីស 4x M3X12 ជាមួយនឹងគ្រាប់
ជំហានទី 3
- បន្ទាប់មកដំឡើងតង្កៀបជាមួយវីស 2x M3X8 ជាមួយនឹងគ្រាប់

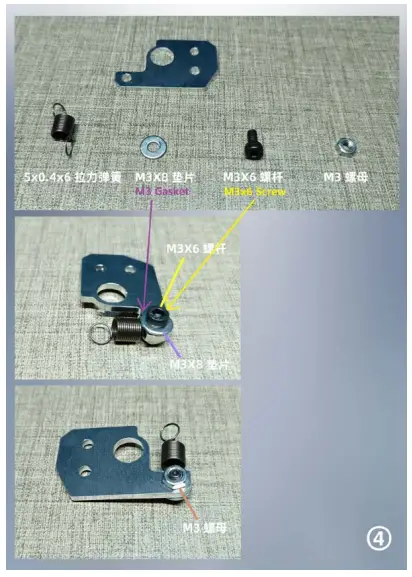
ជំហានទី 4
- ដំឡើងដៃនេះជាមួយនឹងនិទាឃរដូវត្រឡប់មកវិញ
ជំហានទី 5
- ដាក់ពួកវាទាំងអស់រួមគ្នាទៅតង្កៀប

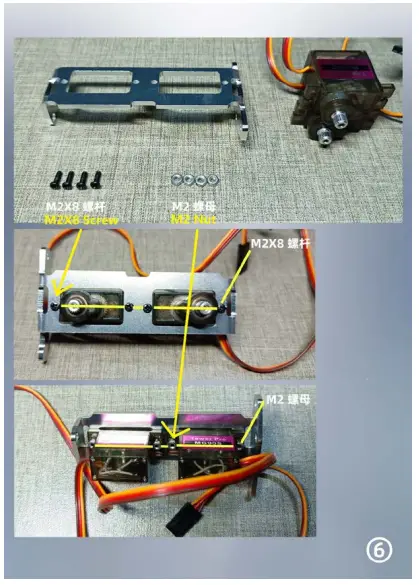
ជំហានទី 6
- ឥឡូវដំឡើង 2servos ជាមួយ M2X8 វីសនិងគ្រាប់
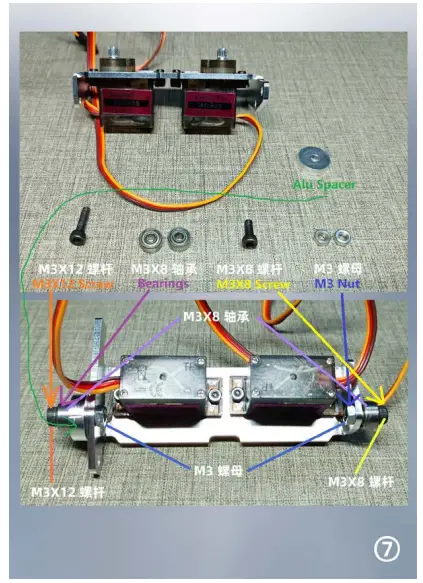
ជំហានទី 7
- បន្ថែមទ្រនាប់ទៅនឹងសំណង់
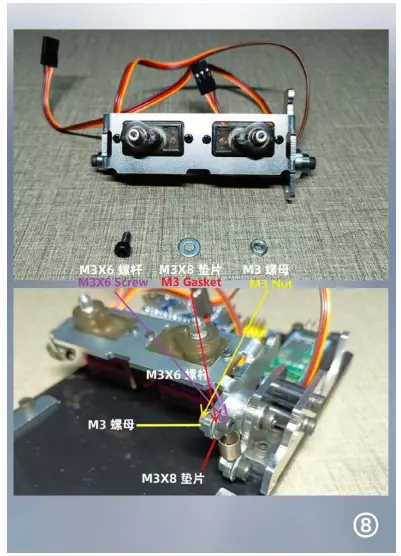
ជំហានទី 8
- ភ្ជាប់ស៊ុមជាមួយ servos ទៅនិទាឃរដូវត្រឡប់មកវិញ
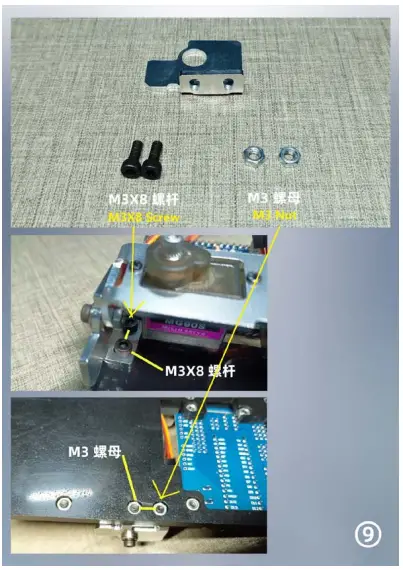
ជំហានទី 9
- ដំឡើងតង្កៀបមូលដ្ឋានទាំងពីរ ហើយភ្ជាប់វាទៅស៊ុម servo
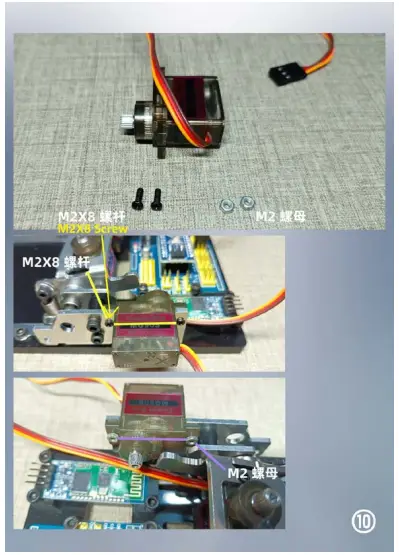
ជំហានទី 10
- ដំឡើង servo ចុងក្រោយ
ជំហានទី 11
- ភ្ជាប់ 3 servos ទៅ Nano expansion Shield ដូចរូបភាពបានបង្ហាញ
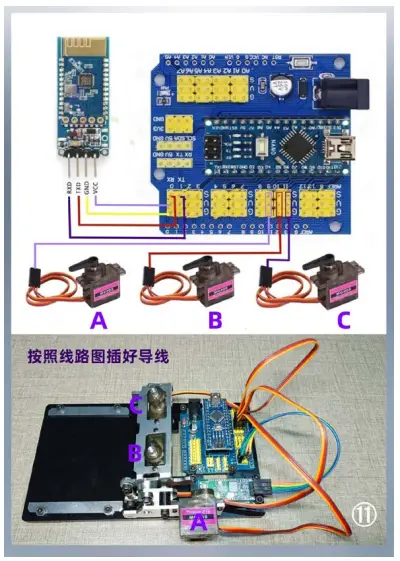
ជំហានទី 12
- បើកភ្លើង ហើយរង់ចាំរហូតដល់ servos ឈប់បើក បន្ទាប់មកបិទថាមពល
- ដំឡើង servo arms ផ្ដេកដូចរូបភាពបានបង្ហាញ

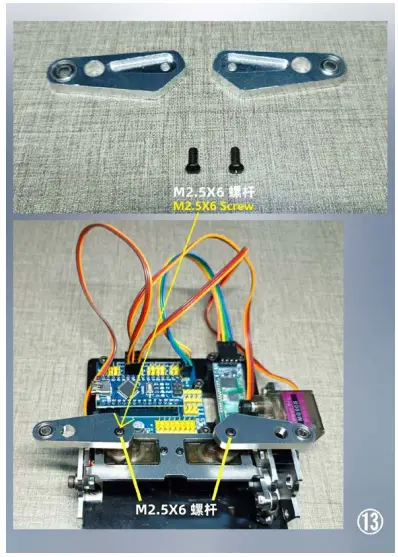
ជំហានទី 13
- ដំឡើងដៃមនុស្សយន្តចំនួន 2 ដោយប្រើវីស M2.5X6
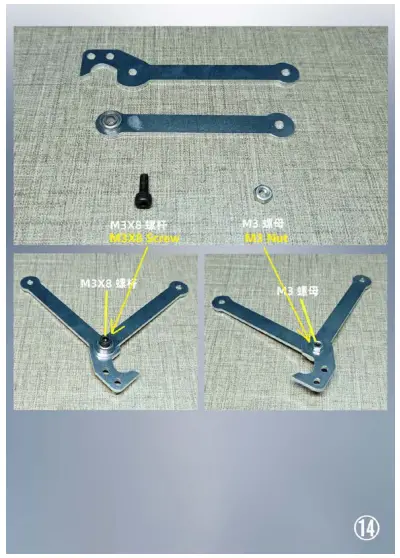
ជំហានទី 14
- និងវីស M3
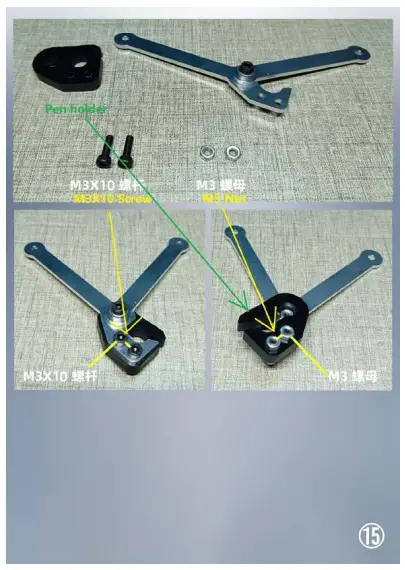
ជំហានទី 15
- ដំឡើងប្រដាប់ដាក់ប៊ិច
ជំហានទី 16
- ដាក់វាទាំងអស់គ្នា ហើយបញ្ចប់ការជួបប្រជុំគ្នា។

សំណួរដែលសួរញឹកញាប់
សំណួរ៖ តើខ្ញុំអាចប្រើមនុស្សយន្តគំនូរដោយរបៀបណា?
A: បើកថាមពលលើមនុស្សយន្ត ហើយរង់ចាំរហូតដល់ servos ឈប់បង្វិល បន្ទាប់មកបិទថាមពល។
សំណួរ៖ តើខ្ញុំភ្ជាប់ servos ទៅនឹង Nano expansion Shield យ៉ាងដូចម្តេច?
A: ភ្ជាប់ 3 servos ទៅនឹង Nano expansion Shield ដូចបង្ហាញក្នុងរូបភាពដែលបានផ្តល់ក្នុងសៀវភៅណែនាំ។
ឯកសារ/ធនធាន
 |
Elektor Arduino គ្រប់គ្រងមនុស្សយន្តគំនូរ [pdf] ការណែនាំអំពីការដំឡើង រ៉ូបូតគំនូរដែលគ្រប់គ្រងដោយ Arduino, មនុស្សយន្តគំនូរដែលបានគ្រប់គ្រង, មនុស្សយន្តគំនូរ, មនុស្សយន្ត |