ប្លុកមុខងារទិសដៅល្បឿន EMD អនុលោមតាម Danfoss
លក្ខណៈបច្ចេកទេស
- ឈ្មោះផលិតផល៖ PLUS+1 អនុលោមតាម EMD Speed Sensor Direction Function Block
- ទិន្នផល៖ RPM និងសញ្ញាទិសដៅ
- ជួរបញ្ចូល៖
- ល្បឿន (Spd): 1,250 ទៅ 10,000,000
- ទិសដៅ (Dir In): 0 ទៅ 5,250 វ៉ុល
ការណែនាំអំពីការប្រើប្រាស់ផលិតផល
ការកំណត់រចនាសម្ព័ន្ធឧបករណ៍បញ្ជា
ប្លុកមុខងារ EMD_SPD_DIR បញ្ចេញ rpm និងសញ្ញាទិសដៅដោយផ្អែកលើការបញ្ចូលពីឧបករណ៍ចាប់សញ្ញាល្បឿន EMD ។ វាអាចប្រើបានទាំងនៅលើឧបករណ៍បញ្ជា MC និង SC ។
តម្រូវការបញ្ចូលឧបករណ៍បញ្ជា
តម្រូវការបញ្ចូលឧបករណ៍បញ្ជាសម្រាប់ប្លុកមុខងារ EMD SPD DIR មានដូចខាងក្រោម៖
- MC Controllers៖
- Spd - MFIn - DirIn
- ឧបករណ៍បញ្ជា SC៖
- Spd - MFin - DirIn - DigAn
មុខងារប្លុកបញ្ចូល
ការបញ្ចូលប្លុកមុខងារ EMD_SPD_DIR មានដូចខាងក្រោម៖
- Spd (ល្បឿន)៖ រថយន្តក្រុងក្នុងមួយ U32 ចំនួន U16 - ជួរ៖
២៩ ដល់ ៣៨ - Dir In (ទិសដៅ)៖ វ៉ុលឡានក្រុង/វ៉ុលtage U16 –
ជួរ: 0 ទៅ 5,250 វ៉ុល
មុខងារប្លុកលទ្ធផល
លទ្ធផលប្លុកអនុគមន៍ EMD_SPD_DIR មានដូចខាងក្រោម៖
- ស្ថានភាព៖ U16 – ជួរ៖ 0 ដល់ 65,535
- កំហុស៖ U16 – ជួរ៖ 0 ដល់ 1,000,000,000
- RPM៖ U16 – ជួរ៖ 0 ដល់ 25,000
- dRPM៖ U16 – ជួរ៖ 0 ដល់ 2,500
- នាយក៖ S8 - តម្លៃ៖ -1, 0, +1
សំណួរគេសួរញឹកញាប់
- តើអ្វីជាគោលបំណងនៃប្លុកមុខងារ EMD_SPD_DIR?
ប្លុកមុខងារ EMD_SPD_DIR បញ្ចេញ rpm និងសញ្ញាទិសដៅដោយផ្អែកលើការបញ្ចូលពីឧបករណ៍ចាប់សញ្ញាល្បឿន EMD ។ - តើតម្រូវការបញ្ចូលអ្វីខ្លះសម្រាប់ប្លុកមុខងារ EMD_SPD_DIR នៅលើឧបករណ៍បញ្ជា MC?
តម្រូវការបញ្ចូលសម្រាប់ឧបករណ៍បញ្ជា MC គឺ Spd, MFIn និង DirIn ។ - តើវ៉ុលគឺជាអ្វីtage range សម្រាប់ Direction input (Dir In) នៃ EMD_SPD_DIR Function Block?
វ៉ុលtagជួរ e សម្រាប់ការបញ្ចូលទិសដៅគឺពី 0 ទៅ 5,250 វ៉ុល។
ប្រវត្តិនៃការពិនិត្យឡើងវិញ
តារាងកែប្រែ
| កាលបរិច្ឆេទ | បានផ្លាស់ប្តូរ | Rev |
| ខែធ្នូ ឆ្នាំ 2014 | AA |
ប្លុកមុខងារ EMD_SPD_DIR
ជាងview
មុខងារនេះរារាំងលទ្ធផល rpm និងសញ្ញាទិសដៅដោយផ្អែកលើការបញ្ចូលពីឧបករណ៍ចាប់សញ្ញាល្បឿន EMD ។ នៅលើទាំងឧបករណ៍បញ្ជា MC និង SC ប្លុកមុខងារនេះទទួលបានរបស់វា៖
- ការបញ្ចូល Spd តាមរយៈការបញ្ចូល MFIn ។
- ការបញ្ចូល DirIn តាមរយៈការបញ្ចូល MFIn ទីពីរ ឬការបញ្ចូល DigAn ។
តម្រូវការបញ្ចូលឧបករណ៍បញ្ជាសម្រាប់ប្លុកមុខងារ EMD
តារាងខាងក្រោមរាយបញ្ជីតម្រូវការបញ្ចូលឧបករណ៍បញ្ជាសម្រាប់ប្លុកមុខងារ EMD SPD DIR, EMD SPD DIR A និង EMD SPD DIR D ។
ការតភ្ជាប់បញ្ចូល - ឧបករណ៍បញ្ជា MC
| ប្លុកមុខងារ | ការបញ្ចូលប្លុកមុខងារ | ការបញ្ចូលឧបករណ៍បញ្ជា | មតិយោបល់ |
| EMD SPD DIR | Spd | MFIN | កំណត់ល្បឿនតាមរយៈសញ្ញាជីពចរពីឧបករណ៍ចាប់សញ្ញា។ |
| ឌី អ៊ីន | MFIN | ប្រើប្រាស់ឧបករណ៍ទប់ទល់ទាញឡើង/ទាញចុះក្រោម និងវ៉ុលtage ដើម្បីរកឃើញការបរាជ័យសៀគ្វីបើកចំហនៃសញ្ញាទិសដៅ។ | |
| EMD SPD DIR A | Spd | MFIN | កំណត់ល្បឿនតាមរយៈសញ្ញាជីពចរពីឧបករណ៍ចាប់សញ្ញា។ |
| ឌី អ៊ីន | ឌីជីអាន | រកឃើញតែនៅពេលដែលសញ្ញាទិសដៅ voltage គឺនៅក្រៅជួរដែលរំពឹងទុក ប៉ុន្តែខ្វះឧបករណ៍ទប់ទាញឡើង/ទាញចុះសម្រាប់ការរកឃើញសៀគ្វីបើកចំហ។ | |
| អានអ៊ីន | រកឃើញតែនៅពេលដែលសញ្ញាទិសដៅ voltage គឺនៅក្រៅជួរដែលរំពឹងទុក ប៉ុន្តែខ្វះឧបករណ៍ទប់ទាញឡើង/ទាញចុះសម្រាប់ការរកឃើញសៀគ្វីបើកចំហ។ | ||
| EMD SPD DIR D | Spd | MFIN | កំណត់ល្បឿនតាមរយៈសញ្ញាជីពចរពីឧបករណ៍ចាប់សញ្ញា។ |
| DigDir | ឌីជីអ៊ីន | ផ្តល់ការរកឃើញកំហុសសម្រាប់សញ្ញាទិសដៅ។ | |
| ឌីជីអាន | ផ្តល់ការរកឃើញកំហុសសម្រាប់សញ្ញាទិសដៅ។ |
ការតភ្ជាប់បញ្ចូល-ឧបករណ៍បញ្ជា SC
| ប្លុកមុខងារ | ការបញ្ចូលប្លុកមុខងារ | ការបញ្ចូលឧបករណ៍បញ្ជា | មតិយោបល់ |
| EMD SPD DIR | Spd | MFIN | កំណត់ល្បឿនតាមរយៈសញ្ញាជីពចរពីឧបករណ៍ចាប់សញ្ញា។ ការបញ្ចូលឧបករណ៍បញ្ជាត្រូវតែដាក់ស្លាក ជីក/អាណា/ប្រេកង់. |
| ឌី អ៊ីន | MFIN | ប្រើប្រាស់ឧបករណ៍ទប់ទល់ទាញឡើង/ទាញចុះក្រោម និងវ៉ុលtage ដើម្បីរកឃើញការបរាជ័យសៀគ្វីបើកចំហនៃសញ្ញាទិសដៅ។ | |
| ឌីជីអាន | ប្រើប្រាស់ឧបករណ៍ទប់ទល់ទាញឡើង/ទាញចុះក្រោម និងវ៉ុលtage ដើម្បីរកឃើញការបរាជ័យសៀគ្វីបើកចំហនៃសញ្ញាទិសដៅ។ |
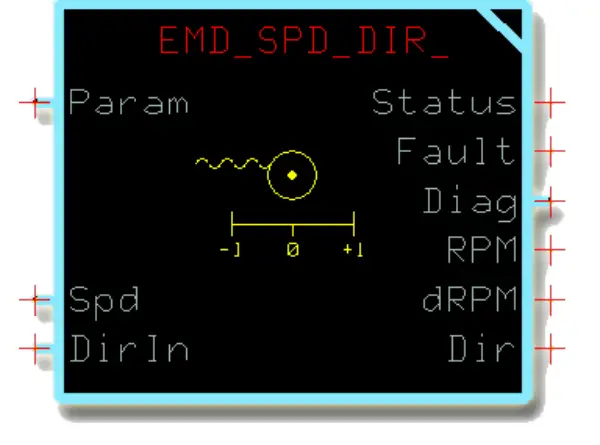
មុខងារប្លុកបញ្ចូល
| ធាតុ | ប្រភេទ | ជួរ | ការពិពណ៌នា |
| ប៉ារ៉ាម | ឡានក្រុង | —— | ការបញ្ចូលសម្រាប់ប៉ារ៉ាម៉ែត្រទូទៅដែលអាចត្រូវបានអនុវត្តចំពោះប្លុកមុខងារច្រើន។ សូមមើល អំពីការបញ្ចូលប៉ារ៉ាម នៅលើទំព័រទី 11 សម្រាប់ព័ត៌មានបន្ថែម។ |
| Spd | ឡានក្រុង | —— | បញ្ចូលសម្រាប់ឡានក្រុងជាមួយ៖
|
| ក្នុងមួយ | U32 | 1,250 ទៅ
10,000,000 |
ទិន្នផលរយៈពេលវាស់វែងដោយ ឧបករណ៍ចាប់សញ្ញាល្បឿន.
ប្លុកមុខងារប្រើ ក្នុងមួយ សញ្ញា, រាប់ សញ្ញា, និង Puls/Rev តម្លៃប៉ារ៉ាម៉ែត្រដើម្បីគណនារបស់វា។ RPM ទិន្នផល។ 10,000 = 1,000 μs។ |
| រាប់ | U16 | ២៩ ដល់ ៣៨ | ចំនួនដែលបានវាស់វែងក្នុងមួយលទ្ធផលរង្វិលជុំកម្មវិធីដោយ ឧបករណ៍ចាប់សញ្ញាល្បឿន.
ប្លុកមុខងារប្រើ ក្នុងមួយ សញ្ញា, រាប់ សញ្ញា, និង Puls/Rev តម្លៃប៉ារ៉ាម៉ែត្រដើម្បីគណនារបស់វា។ RPM ទិន្នផល។ 1,000 = 1,000 ។ |
| កំណត់រចនាសម្ព័ន្ធ | ឡានក្រុងរង | —— | មានសញ្ញាដែលកំណត់រចនាសម្ព័ន្ធធាតុបញ្ចូលនេះ។ |
| ឌៀ អ៊ិន | ឡានក្រុង | —— | បញ្ចូលសម្រាប់ឡានក្រុងជាមួយ៖
|
| វ៉ុល/វ៉ុលtage | U16 | ២៩ ដល់ ៣៨ | វ៉ុលដែលបានវាស់វែងtage នៃទិសដៅសញ្ញាថា ឧបករណ៍ចាប់សញ្ញាល្បឿន លទ្ធផល ដែលប្លុកប្រើដើម្បីកំណត់ទិសដៅ។ |
| កំណត់រចនាសម្ព័ន្ធ | ឡានក្រុងរង | —— | មានសញ្ញាដែលកំណត់រចនាសម្ព័ន្ធធាតុបញ្ចូលនេះ។ |
លទ្ធផល
មុខងារប្លុកលទ្ធផល
| ធាតុ | ប្រភេទ | ជួរ | ការពិពណ៌នា |
| ស្ថានភាព | U16 | —— | រាយការណ៍ពីស្ថានភាពប្លុកមុខងារ។
ប្លុកមុខងារនេះប្រើ a មិនស្តង់ដារ គ្រោងការណ៍ bitwise ដើម្បីរាយការណ៍ពីស្ថានភាព និងកំហុសរបស់វា។
|
| កំហុស | U16 | —— | រាយការណ៍ពីកំហុសរបស់ប្លុកមុខងារ។
ប្លុកមុខងារនេះប្រើ a មិនស្តង់ដារ គ្រោងការណ៍ bitwise ដើម្បីរាយការណ៍ពីស្ថានភាព និងកំហុសរបស់វា។
|
| ធ្វើរោគវិនិច្ឆ័យ | ឡានក្រុង | —— | ចេញឡានក្រុងជាមួយ ប្រេកង់, FltTmrDir, និង FltTmrFreq សញ្ញាដែលមានសម្រាប់ការដោះស្រាយបញ្ហា។ |
| ប្រេកង់ | U32 | 0 ទៅ 1,000,
000,000 |
ប្រេកង់វាស់នៃឧបករណ៏ល្បឿន។ 100,000 = 10,000 ហឺត។ |
| កំហុសTmrFreq | U16 | ២៩ ដល់ ៣៨ | នៅពេលមានកំហុសប្រេកង់៖
|
| FltTmrDir | U16 | ២៩ ដល់ ៣៨ | នៅពេលមានកំហុសទិសដៅ៖
|
| RPM | U16 | ២៩ ដល់ ៣៨ | បដិវត្តឧបករណ៏ល្បឿនក្នុងមួយនាទី។
ប្លុកមុខងារ clamps ទិន្នផលនេះនៅ 2,500 ។ 1 = 1 rpm ។ |
| dRPM | U16 | ២៩ ដល់ ៣៨ | បដិវត្តឧបករណ៏ល្បឿនក្នុងមួយនាទី x 10 (deciRPM) ។ ប្លុកមុខងារ clamps ទិន្នផលនេះនៅ 25,000 ។ |
| លោក | S8 | -1, 0, +1 | ទិសដៅនៃការបង្វិលរបស់ឧបករណ៍ចាប់សញ្ញាល្បឿន។
|
អំពីមុខងារប្លុកការតភ្ជាប់
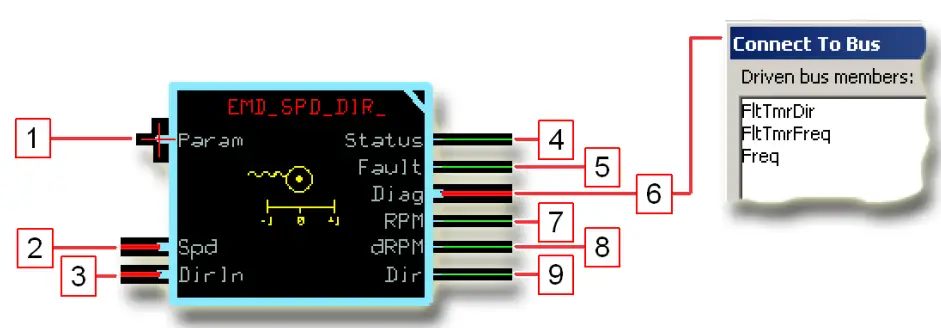
អំពីមុខងារប្លុកការតភ្ជាប់
| ធាតុ | ការពិពណ៌នា |
| 1. | ការបញ្ចូលសម្រាប់ប៉ារ៉ាម៉ែត្រទូទៅដែលអាចត្រូវបានអនុវត្តចំពោះប្លុកមុខងារច្រើន។ |
| 2. | បញ្ចូលសម្រាប់ឡានក្រុងជាមួយ៖
|
| 3. | បញ្ចូលសម្រាប់ឡានក្រុងជាមួយ៖
|
| 4. | រាយការណ៍ពីស្ថានភាពនៃប្លុកមុខងារ។ |
| 5. | រាយការណ៍ពីកំហុសនៃប្លុកមុខងារ។ |
| 6. | ចេញឡានក្រុងជាមួយ ប្រេកង់, FltTmrDir, និង FltTmrFreq សញ្ញាដែលមានសម្រាប់ការដោះស្រាយបញ្ហា។ |
| 7. | បដិវត្តឧបករណ៏ល្បឿនក្នុងមួយនាទី។ |
| 8. | បដិវត្តឧបករណ៏ល្បឿនក្នុងមួយនាទី x 10 (deciRPM) ។ |
| 9. | ទិសដៅនៃការបង្វិលរបស់ឧបករណ៍ចាប់សញ្ញាល្បឿន។
|
ស្ថានភាព និងតក្កវិជ្ជាកំហុស
មិនដូចប្លុកមុខងារអនុលោមតាម PLUS+1 ផ្សេងទៀតទេ ប្លុកមុខងារនេះប្រើស្ថានភាពមិនស្តង់ដារ និងលេខកូដកំហុស។
តក្កវិជ្ជាស្ថានភាព
| ស្ថានភាព | ហេក* | គោលពីរ | មូលហេតុ | ការឆ្លើយតប | ការកែតម្រូវ |
| ប៉ារ៉ាម៉ែត្រមួយគឺនៅក្រៅជួរ។ | 0x0008 | 1000 | Puls/Rev, FaultDetTm, ឬ DirLockHz ប៉ារ៉ាម៉ែត្រគឺនៅក្រៅជួរ។ | ប្លុកមុខងារ clamps តម្លៃក្រៅជួរនៅដែនកំណត់ខាងលើ ឬខាងក្រោមរបស់វា។ | ទទួលបានប៉ារ៉ាម៉ែត្រក្រៅជួរត្រឡប់មកវិញនៅក្នុងជួររបស់វា។ |
* Bit 16 កំណត់ទៅ 1 កំណត់ស្ថានភាព Danfoss ស្តង់ដារ ឬកូដកំហុស។
តក្កវិជ្ជាកំហុស
| កំហុស | ហេក* | គោលពីរ | មូលហេតុ | ការឆ្លើយតប | ពន្យារពេល† | កូនសោ‡ | ការកែតម្រូវ |
| ក្នុងមួយ សញ្ញានៅក្នុងប្លុកមុខងារ Spd ការបញ្ចូលគឺទាបពេក។ | 0x0001 | 0001 | ក្នុងមួយ សញ្ញា < 1,250 Hz ។ | ប្លុកមុខងារបញ្ចេញអតិបរមារបស់វា។ RPM និង dRPM តម្លៃ។ | Y | N | ពិនិត្យរកមើលបញ្ហាផ្នែករឹង ដូចជាសំឡេងអគ្គិសនី ដែលអាចបង្កើតមិនត្រឹមត្រូវ ក្នុងមួយ តម្លៃសញ្ញា។ |
| វ៉ុល/វ៉ុលtage សញ្ញានៅក្នុងប្លុកមុខងារ Spd ការបញ្ចូលគឺនៅក្រៅជួរ។ | 0x0002 | 0010 | វ៉ុល/វ៉ុលtage សញ្ញាគឺពី 1,000 ទៅ 2,500 mV
និង ប្លុកមិនទទួលបានជីពចរពីឧបករណ៍ចាប់សញ្ញាល្បឿនទេ។ |
ប្លុកមុខងារកំណត់របស់វា។ RPM និង dRPM លទ្ធផលទៅ 0 ។ | Y | N | ពិនិត្យរកមើលបញ្ហាផ្នែករឹង ដូចជាសំឡេងអគ្គិសនី ដែលអាចបង្កើតមិនត្រឹមត្រូវ វ៉ុល / វ៉ុលtage តម្លៃសញ្ញា។ |
| វ៉ុល/វ៉ុលtage សញ្ញានៅក្នុងប្លុកមុខងារ លោក ការបញ្ចូលគឺនៅក្រៅជួរ។ | 0x0004 | 0100 | វ៉ុល/វ៉ុលtage សញ្ញាគឺពី 1,000 ទៅ 2,500
mV |
ប្លុកមុខងារកំណត់របស់វា។ លោក ទិន្នផលទៅ 0 ។ | Y | N | ពិនិត្យរកមើលបញ្ហាផ្នែករឹង ដូចជាសំឡេងអគ្គិសនី ដែលអាចបង្កើតមិនត្រឹមត្រូវ វ៉ុល / វ៉ុលtage តម្លៃសញ្ញា។ |
* Bit 16 កំណត់ទៅ 1 កំណត់ស្ថានភាព Danfoss ស្តង់ដារ ឬកូដកំហុស។
† កំហុសដែលបានពន្យារពេលត្រូវបានរាយការណ៍ ប្រសិនបើស្ថានភាពកំហុសដែលបានរកឃើញនៅតែបន្តសម្រាប់រយៈពេលពន្យារពេលជាក់លាក់មួយ។ កំហុសដែលពន្យារពេលមិនអាចត្រូវជម្រះបានទេ រហូតទាល់តែស្ថានភាពកំហុសនៅតែមិនអាចរកឃើញសម្រាប់ពេលវេលាពន្យាពេល។
‡ ប្លុកមុខងាររក្សារបាយការណ៏កំហុសឆ្គង រហូតទាល់តែគន្លឺះចេញ។
មុខងារប្លុកប៉ារ៉ាម៉ែត្រ
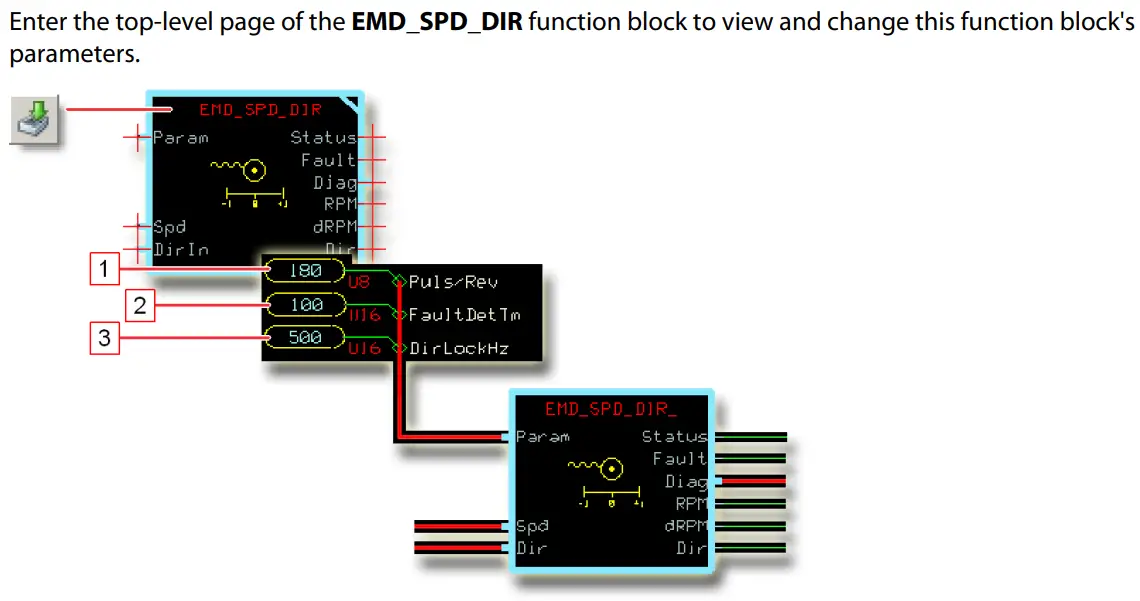
មុខងារប្លុកប៉ារ៉ាម៉ែត្រ
| ធាតុ | ប្រភេទ | ជួរ | ការពិពណ៌នា |
| 1. Puls/Rev | U8 | ២–៣២, ៣ | ចំនួនជីពចរក្នុងមួយបដិវត្តនៃឧបករណ៏ល្បឿន។ យោងទៅ ព័ត៌មានបច្ចេកទេសឧបករណ៍ចាប់សញ្ញាល្បឿន EMD (ផ្នែក Danfoss L1017287) សម្រាប់តម្លៃត្រឹមត្រូវ។ |
| 2. FaultDetTm | U16 | ០–៤២៥ | កំណត់ពេលវេលារវាងពេលដែលប្លុកមុខងាររកឃើញ៖
|
| 3. DirLockHz | U16 | ០–៤២៥ | កំណត់ប្រេកង់ខាងលើដែលប្លុកមុខងាររបស់ លោក ចាក់សោទិន្នផល។ លើសពីប្រេកង់នេះ ប្លុកមុខងារមិនរាយការណ៍ពីការផ្លាស់ប្តូរទិសដៅទេ។
1,000 = 1,000 ហឺត។ |
អំពីការបញ្ចូលប៉ារ៉ាម
ប្រើការបញ្ចូល Param ដើម្បីបញ្ចូលតម្លៃប៉ារ៉ាម៉ែត្រខាងក្រៅទៅកាន់ប្លុកមុខងារនេះ។

រូបភាពលម្អិត
| ធាតុ | ការពិពណ៌នា |
| 1. | នៅខាងក្នុងទំព័រកម្រិតកំពូលនៃប្លុកមុខងារ មុនពេលអ្នកកែប្រែទំព័រនេះដើម្បីទទួលយកប៉ារ៉ាម៉ែត្រទូទៅតាមរយៈរបស់វា។ ប៉ារ៉ាម បញ្ចូល។ |
| 2. | នៅខាងក្នុងទំព័រកម្រិតកំពូលនៃប្លុកមុខងារ បន្ទាប់ពីអ្នកកែប្រែទំព័រនេះដើម្បីទទួលយកប៉ារ៉ាម៉ែត្រទូទៅតាមរយៈរបស់វា។ ប៉ារ៉ាម បញ្ចូល។ |
ការកំណត់រចនាសម្ព័ន្ធឧបករណ៍បញ្ជា
ការបញ្ចូលនៅលើឧបករណ៍បញ្ជា MC និង SC ទាមទារការកំណត់រចនាសម្ព័ន្ធដើម្បីធ្វើការជាមួយប្លុកមុខងារនេះ។ សូមមើល៖
- MC Controller Configurations នៅទំព័រ 12 ។
- SC Controller Configurations នៅទំព័រ 16 ។
ការកំណត់រចនាសម្ព័ន្ធឧបករណ៍បញ្ជា MC
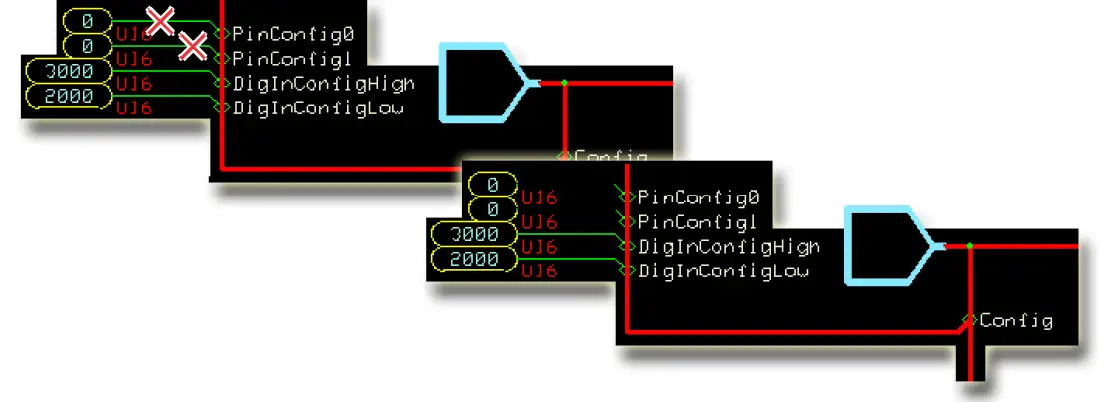
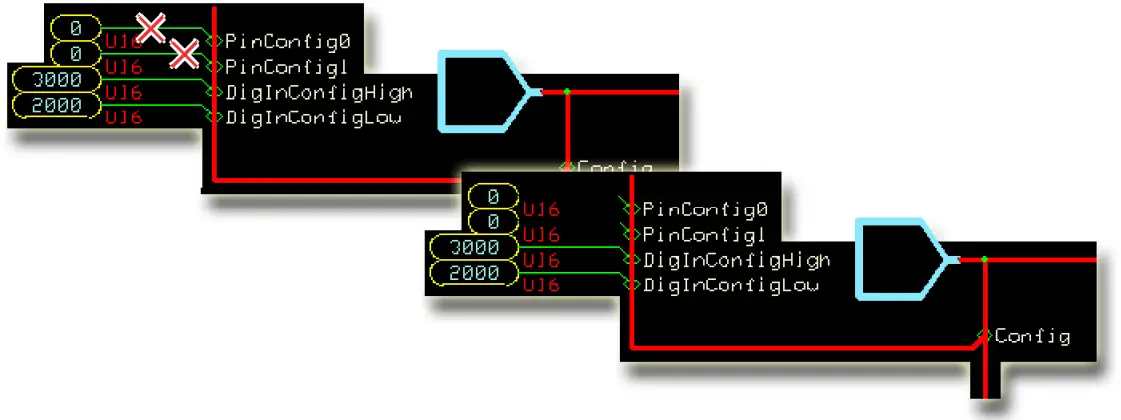
កំណត់រចនាសម្ព័ន្ធបញ្ចូល
| ការបញ្ចូលប្លុកមុខងារ | ប្រភេទបញ្ចូលដែលត្រូវគ្នា។ | សកម្មភាពកំណត់រចនាសម្ព័ន្ធ |
| Spd | MFIN | លុប៖
|
| ឌី អ៊ីន | MFIN | លុប៖
|
| ឌីជីអាន | លុប៖
|
ការកំណត់រចនាសម្ព័ន្ធឧបករណ៍បញ្ជា
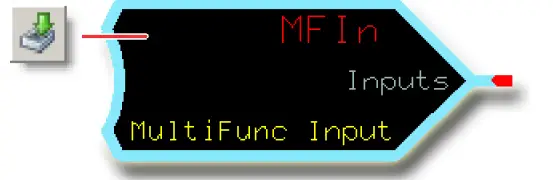
របៀបកំណត់ MFIn សម្រាប់ការបញ្ចូល Spd
- នៅក្នុងគំរូ GUIDE សូមបញ្ចូលទំព័របញ្ចូល។
- បញ្ចូល MFIn ដែលទទួលសញ្ញាបញ្ចូល។
- ធ្វើការផ្លាស់ប្តូរដែលត្រូវបានបង្ហាញក្នុងរូបខាងក្រោម។
ការកំណត់រចនាសម្ព័ន្ធឧបករណ៍បញ្ជា
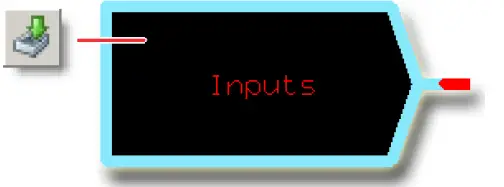
របៀបកំណត់ MFIn សម្រាប់ការបញ្ចូល DirIn
- នៅក្នុងគំរូ GUIDE សូមបញ្ចូលទំព័របញ្ចូល។
- បញ្ចូល MFIn ដែលទទួលសញ្ញាបញ្ចូល។
- ធ្វើការផ្លាស់ប្តូរដែលត្រូវបានបង្ហាញក្នុងរូបខាងក្រោម។
របៀបកំណត់ DigAn សម្រាប់ការបញ្ចូល DirIn
- នៅក្នុងគំរូ GUIDE សូមបញ្ចូលទំព័របញ្ចូល។
- ចូលទំព័រ DigAn ដែលទទួលសញ្ញាបញ្ចូល។
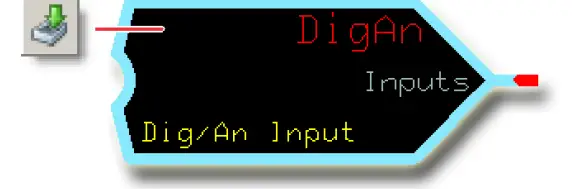
- ធ្វើការផ្លាស់ប្តូរដែលត្រូវបានបង្ហាញក្នុងរូបខាងក្រោម។

ការកំណត់រចនាសម្ព័ន្ធឧបករណ៍បញ្ជា SC
កំណត់រចនាសម្ព័ន្ធបញ្ចូល
| ការបញ្ចូលប្លុកមុខងារ | ប្រភេទបញ្ចូលដែលត្រូវគ្នា។ | សកម្មភាពកំណត់រចនាសម្ព័ន្ធ |
| Spd | MFIN* | លុប៖
|
| ឌី អ៊ីន | MFIN | លុប៖
|
| ឌីជីអាន | លុប៖
|
* MFIn ដែលអ្នកប្រើត្រូវតែដាក់ស្លាក Dig/Ana/Freq ។
†ប្រសិនបើមានវត្តមាន។
របៀបកំណត់ MFIn សម្រាប់ការបញ្ចូល Spd
- នៅក្នុងគំរូ GUIDE សូមបញ្ចូលទំព័របញ្ចូល។
- បញ្ចូល MFIn ដែលទទួលសញ្ញាបញ្ចូល។
- ធ្វើការផ្លាស់ប្តូរដែលត្រូវបានបង្ហាញក្នុងរូបខាងក្រោម។

របៀបកំណត់ MFIn សម្រាប់ការបញ្ចូល DirIn
- នៅក្នុងគំរូ GUIDE សូមបញ្ចូលទំព័របញ្ចូល។

- បញ្ចូល MFIn ដែលទទួលសញ្ញាបញ្ចូល។
- ធ្វើការផ្លាស់ប្តូរដែលត្រូវបានបង្ហាញក្នុងរូបខាងក្រោម។

របៀបកំណត់ DigAn សម្រាប់ការបញ្ចូល DirIn
- នៅក្នុងគំរូ GUIDE សូមបញ្ចូលទំព័របញ្ចូល។
- បញ្ចូល DigAn ដែលទទួលសញ្ញាបញ្ចូល។

- ធ្វើការផ្លាស់ប្តូរដែលត្រូវបានបង្ហាញក្នុងរូបខាងក្រោម។
ផលិតផលដែលយើងផ្តល់ជូន
- Bent Axis Motors
- បិទសៀគ្វី Axial Piston Pumps និងម៉ូទ័រ
- ការបង្ហាញ
- ចង្កូតថាមពលអគ្គិសនី
- អេឡិចត្រូអ៊ីដ្រូលីក
- ចង្កូតថាមពលធារាសាស្ត្រ
- ប្រព័ន្ធរួមបញ្ចូលគ្នា
- យ៉យស្ទីក និងដៃបញ្ជា
- Microcontrollers និង Software
- បើកសៀគ្វី Axial Piston Pumps
- ម៉ូទ័រគន្លង
- PLUS+1® មគ្គុទ្ទេសក៍
- វ៉ាល់សមាមាត្រ
- ឧបករណ៍ចាប់សញ្ញា
- ចង្កូត
- ដ្រាយឧបករណ៍លាយឆ្លងកាត់
Danfoss Power Solutions គឺជាក្រុមហ៊ុនផលិត និងផ្គត់ផ្គង់សកលនៃសមាសធាតុធារាសាស្ត្រ និងអេឡិចត្រូនិចដែលមានគុណភាពខ្ពស់។ យើងមានជំនាញក្នុងការផ្តល់នូវបច្ចេកវិទ្យាទំនើប និងដំណោះស្រាយដែលល្អឥតខ្ចោះនៅក្នុងលក្ខខណ្ឌប្រតិបត្តិការដ៏លំបាកនៃទីផ្សារទូរស័ព្ទចល័តក្រៅផ្លូវហាយវេ។ ដោយផ្អែកលើជំនាញកម្មវិធីទូលំទូលាយរបស់យើង យើងធ្វើការយ៉ាងជិតស្និទ្ធជាមួយអតិថិជនរបស់យើង ដើម្បីធានាបាននូវការអនុវត្តដ៏ពិសេសសម្រាប់យានជំនិះក្រៅផ្លូវដ៏ធំទូលាយ។
យើងជួយ OEMs ជុំវិញពិភពលោកបង្កើនល្បឿននៃការអភិវឌ្ឍន៍ប្រព័ន្ធ កាត់បន្ថយការចំណាយ និងនាំយានយន្តទៅកាន់ទីផ្សារកាន់តែលឿន។
Danfoss - ដៃគូខ្លាំងបំផុតរបស់អ្នកនៅក្នុង Mobile Hydraulics ។
ទៅ www.powersolutions.danfoss.com សម្រាប់ព័ត៌មានបន្ថែមអំពីផលិតផល។
គ្រប់ទីកន្លែងដែលយានជំនិះបិទផ្លូវហាយវេនៅកន្លែងធ្វើការ ក៏ Danfoss ដែរ។ យើងផ្តល់ជូនអ្នកជំនាញទូទាំងពិភពលោកនូវការគាំទ្រសម្រាប់អតិថិជនរបស់យើង ដោយធានានូវដំណោះស្រាយដែលអាចធ្វើទៅបានសម្រាប់ការអនុវត្តឆ្នើម។ ហើយជាមួយនឹងបណ្តាញទូលំទូលាយនៃដៃគូសេវាកម្មសកល យើងក៏ផ្តល់សេវាសកលដ៏ទូលំទូលាយសម្រាប់សមាសធាតុទាំងអស់របស់យើង។
សូមទាក់ទងតំណាង Danfoss Power Solution ដែលនៅជិតអ្នកបំផុត។
Comatrol
www.comatrol.com
Schwarzmüller-Inverter www.schwarzmueller-inverter.com
ទូរ៉ូឡា
www.turollaocg.com
វ៉ាលម៉ូវ៉ា
www.valmova.com
Hydro-Gear
www.hydro-gear.com
Daikin-Sauer-Danfoss www.daikin-sauer-danfoss.com
ដាន់ហ្វូស
ក្រុមហ៊ុន Power Solutions (US) Company 2800 East 13th Street
Ames, IA 50010, សហរដ្ឋអាមេរិក
ទូរស័ព្ទ៖ +1 515 239 6000
ដាន់ហ្វូស
Power Solutions GmbH & Co. OHG Krokamp 35
D-24539 Neumünster ប្រទេសអាល្លឺម៉ង់ ទូរស័ព្ទ៖ +49 4321 871 0
ដាន់ហ្វូស
ដំណោះស្រាយថាមពល ApS Nordborgvej ៨១
DK-6430 Nordborg ប្រទេសដាណឺម៉ាក ទូរស័ព្ទ៖ +45 7488 2222
ដាន់ហ្វូស
Power Solutions (Shanghai) Co., Ltd.
អាគារ #22, លេខ 1000 Jin Hai Rd Jin Qiao, Pudong New District Shanghai, China 201206 ទូរស័ព្ទ៖ +86 21 3418 5200
Danfoss អាចទទួលយកដោយមិនទទួលខុសត្រូវចំពោះកំហុសដែលអាចកើតមាននៅក្នុងកាតាឡុក ខិត្តប័ណ្ណ និងសម្ភារៈបោះពុម្ពផ្សេងទៀត។ Danfoss រក្សាសិទ្ធិក្នុងការផ្លាស់ប្តូរផលិតផលរបស់ខ្លួនដោយមិនមានការជូនដំណឹងជាមុន។ នេះក៏អនុវត្តចំពោះផលិតផលដែលមានការបញ្ជាទិញរួចហើយ ដោយផ្តល់ថាការកែប្រែបែបនេះអាចត្រូវបានធ្វើឡើងដោយមិនចាំបាច់មានការផ្លាស់ប្តូរនៅក្នុងលក្ខណៈជាក់លាក់ដែលបានព្រមព្រៀងរួចហើយ។
ពាណិជ្ជសញ្ញាទាំងអស់នៅក្នុងសម្ភារៈនេះគឺជាកម្មសិទ្ធិរបស់ក្រុមហ៊ុនរៀងៗខ្លួន។ Danfoss និងប្រភេទនិមិត្តសញ្ញា Danfoss គឺជាពាណិជ្ជសញ្ញារបស់ Danfoss A/S ។ រក្សារសិទ្ធគ្រប់យ៉ាង។
L1429328 • Rev AA • ខែធ្នូ 2014
www.danfoss.com
© Danfoss A/S, 2014
ឯកសារ/ធនធាន
 |
ប្លុកមុខងារទិសដៅល្បឿន EMD អនុលោមតាម Danfoss [pdf] សៀវភៅណែនាំអ្នកប្រើប្រាស់ អនុលោមតាមប្លុកមុខងារទិសដៅល្បឿន EMD ប្លុកមុខងារទិសដៅល្បឿន ប្លុកមុខងារទិសដៅ ប្លុកមុខងារ ប្លុក |



